
Page 33 - 《精细化工》2023年第6期
P. 33
第 6 期 钟宛真,等: 水中微塑料光催化处理的进展 ·1183·
催化性能,UEKERT 等 [70] 以廉价、无毒的 CN x |Ni 2 P 马达的移动方向,PS 也随之移动而被去除,如图 10
为催化剂研究了模拟太阳光下 PET、聚乳酸(PLA) 所示,微电机在两种燃料(H 2 O 和 H 2 O 2 )中均稳定
的降解。与其他光催化剂不同的是,该反应过程中 运动并且实现了 PS 的快速捕集,但与 H 2 O 相比,
•OH 几乎不起作用,且 CN x |Ni 2 P 非均相光催化系统 在 H 2 O 2 溶液中移动速度更快。
通过 PET 和 PLA 等废物原料成功生成能源 H 2 。该
+
过程中 h 直接攻击聚合物分子,致其分子量降低,
–
而 e 则与水反应生成 H 2 ,机理如图 9 所示。
3.3 光催化微机器人
光催化微机器人可从环境中获取能量转化为自
身动能,称为主动粒子,MPs 为被动粒子,被动粒
子会与主动粒子表现出很强的电泳相互作用,随主
动粒子形成一定的运动轨迹 [71] ,利用这一特性可有
效去除水中的 MPs 颗粒。光催化微机器人在复杂的
环境中具有“即时”捕获和降解微塑料的能力,为
TiO 2 光催化降解 MPs 提供了一种新思路,并且对微
塑料的去除不局限于某种材料和形状。 [70]
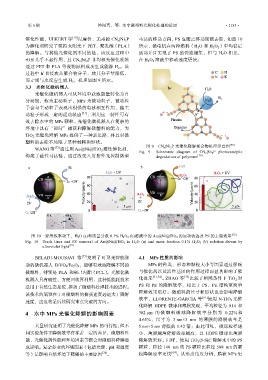
WANG 等 [72] 通过用 Au@Ni@TiO 2 磁性催化剂, 图 9 CN x |Ni 2 P 光催化降解聚合物机理示意图
Fig. 9 Schematic diagram of CN x |Ni 2 P photocatalytic
构建了磁性马达链,通过改变入射紫外光控制微型 degradation of polymers [70]
图 10 紫外线驱动下,H 2 O (a)和质量分数 0.1% H 2 O 2 (b)溶液中的 Au@Ni@TiO 2 的运动轨迹及 PS 的去除效果 [72]
Fig. 10 Track lines and PS removal of Au@Ni@TiO 2 in H 2 O (a) and mass fraction 0.1% H 2 O 2 (b) solution driven by
ultraviolet light [72]
BELADI-MOUSAVI 等 [73] 发明了可见光智能驱 4.1 MPs 性质的影响
动的微机器人 BiVO 4/Fe 3O 4 ,能够有效地降解不同的 MPs 的种类、形态和颗粒大小等因素通过影响
微塑料,特别是 PLA 和聚己内酯(PCL)。光催化微 与催化剂以及活性基团的作用过程而显著影响了催
机器人具有磁性,方便回收再利用,这种低能耗技术 化效果 [51,74] 。ZHAO 等 [75] 比较了相同条件下 TiO 2 对
适用于自然生态系统,推动了微塑料处理技术的进程。 PS 和 PE 的降解效率,相比于 PS,PE 结构更简单
降解效果更好。微塑料的尺寸和形状也会影响降解
该技术的瓶颈在于对微塑料的捕获速度远远大于降解
效率,LLORENTE-GARCÍA 等 [61] 使用 N-TiO 2 光催
速度,这也将是后续研究重点突破的方向。
化降解 HDPE 微球和薄膜发现,平均粒径为 814 和
4 水中 MPs 光催化降解的影响因素 382 μm 的微塑料微球降解效率分别为 0.22%和
4.65%,尺寸为 3 nm×3 nm 的薄膜的降解效率是
大量研究证明了光催化降解 MPs 的可行性,但不 5 nm×5 nm 薄膜的 1.42 倍;由此可见,微球粒径越
同实验条件下降解效率存在着一定的差异,微塑料性 小、薄膜越薄降解效率越高,且 HDPE 微球比薄膜
能、光催化剂性能和环境因素等都会对微塑料降解造 降解效果好。同样,使用 TiO 2 /β-SiC 降解水中的 PS
成影响。复杂多变的环境因素(包括光源、pH 和温度 颗粒,粒径 140 nm 的 PS 颗粒比粒径 508 nm 的颗
等)是影响自然环境下降解的主要原因 [74] 。 粒降解速率更快 [64] 。从形态角度分析,膜状 MPs 更